Урок: Как да програмирате Chevrolet Volt LT 2017, за да позволите работа с Openpilot, използвайки Techline Connect SPS.
Няколко души успешно са активирали Openpilot на LT Volts 2017 без фабрични Premier функции. Този раздел ще обхване модификациите на фърмуера, необходими за активиране на Openpilot. Необходими са и модификации на хардуера. Стандартният круиз контрол няма да работи след тези модификации, само круиз контролът ще бъде наличен през Openpilot, след като системата бъде стартирана.
Въведение
Chevrolet Volt (2016-2018) е популярен автомобил за използване с OpenPilot и C2/C3. От кутията се поддържа само Volt с опция Premier и пакет Driver Convenience II. Този модел включва радар зад папионката на решетката, LKAS и адаптивен круиз контрол. LT версията не се поддържа официално, нито пък Premier версията без радар и адаптивен круиз контрол. Но... Има начин! Така или иначе, трябва да имате радар, който лесно може да се закупи и свърже към OBDII порта, както и прозрачната папионка за радара, която е много по-трудна за намиране. Мисля, че това е по избор, ако искате да използвате точно този надлъжн модел Alpha E2E.
Всички основни модули в превозното средство са еднакви между версиите LT и Premier. Това означава, че единственото ограничение е в софтуера, i.e., който командва ECM (модул за управление на двигателя), BCM (модул за управление на каросерията), спирачния модул, модула за сервоуправление и клъстера, са готови да приемат/предават данни помежду си и OpenPilot. GM може да промени софтуера си в бъдеще, нарушавайки процеса. Както винаги, правете това на свой собствен риск. В най-лошия случай модулът на превозното средство може да бъде неработещ, ако се направи неправилно. Модификация на фърмуера като тази ще доведе до DTC (диагностични кодове за неизправности), които ще бъдат невидими за потребителя (няма икони на таблото), но ще бъдат видими, ако занесете автомобила при дилъра. Всички кодове се отнасят до загубена комуникация с Premier модули, които не съществуват, като например Park Assist и Blind Spot Monitoring, и не влияят на нормалната работа.
След програмирането, фабричният круиз контрол ще престане да съществува, винаги трябва да използвате Openpilot.
Задължително
- GM TechLine Connect (включен при покупка срещу VIN)
- Система за развойно програмиране на GM (DPS)
- Компютър с Windows 10 или 11 с поне 8GB RAM и съвременни спецификации (вижте списъка със спецификации на уебсайта на GM)
- VX мениджър
- VXDIAG VCX Nano GM OBDII програматор (или еквивалентен продукт/официален MDI от GM)
- Около 2-5 часа в зависимост от скоростта на компютъра и вашите умения за работа със системите
- Интернет връзка по време на всички задачи по програмиране
Бележки:
- Колата трябва да бъде изключена от зарядното устройство на стената.
- Колата трябва да бъде свързана към 12V зарядно устройство (аз го направих без него, но софтуерът го препоръчва, тъй като колебанията в напрежението на батерията могат да причинят неблагоприятни ефекти при програмиране). i.e., блокиране на модул).
- Ако използвате лаптоп, уверете се, че батерията е достатъчно заредена или го дръжте включен в контакта.
- Най-голям успех съм постигнал при програмиране, когато колата е в режим на поддръжка (задръжте бутона за стартиране натиснат с крак от спирачката за около 5 секунди). * Ако имате проблеми с това, опитайте с напълно запален или изключен двигател.
- След като приключите с програмирането, бъдете изключително внимателни, когато тествате Openpilot за първи път; може да работи или да не работи правилно (няма надлъжен или страничен контрол). След като потвърдите, че всичко работи както се очаква, е като Premier Volt!
- По време на програмирането, различни звънци/светлини ще се включват и изключват/релета ще тракат; това е нормално.
- Ако не деактивирате антивирусната програма и защитната стена, ще имате проблеми! VX Manager е маркиран като вирус по някаква причина. Инсталирах го на чисто инсталиран Windows от предпазливост.
Подготовка на софтуер
- Инсталирайте VX Manager. Инсталирайте само „PASSTHROUGH - J2534“. GM пакетите ще бъдат обработени от инсталацията на GM.
- Инсталирайте GM TechLine Connect
- Инсталиране на GM система за развойно програмиране/пачове
ACDelcoTDS
ACDelcoTDS е онлайн порталът на GM за диагностика и програмиране на превозни средства. Един VIN номер струва 45 долара за година.
Влезте в профила си https://www.acdelcotds.com/абонаментиили създайте акаунт, ако е необходимо.
Когато купувате VIN чрез системата, ще трябва да намерите VIN, който има желания от вас софтуер. i.e., Premier с пакет Driver Confidence II (уверете се, че има плоска пластмасова облицовка там, където е папионката на решетката). Също така се уверете, че избраният от вас VIN е от същата година като вашия автомобил.
По желание можете да закупите друг VIN номер, който е действителният автомобил, който притежавате. В случай че нещата не работят, можете да инсталирате оригиналния фърмуер обратно на колата (или ако продадете колата и искате да я върнете към фабрично състояние).
След като закупите устройството, ще видите активните си VIN номера под „Моите абонаменти“. Кликнете върху „Преглед“, след което изберете Premier VIN номера. Това ще ви отведе до страница за изтегляне и инсталиране на TechLine Connect, ако все още не сте го направили. Ако TechLine Connect е инсталиран, ще видите опция за стартирането му. Преди да стартирате/инсталирате TechLine Connect, отворете VX Manager. Вашият VCX Nano ще издаде звуков сигнал, за да потвърди връзката. Ако не го направи, изберете „повторно свързване“ на главния екран.
VIN абонаменти.
VXManager Свържете се отново, ако е необходимо.
Действително програмиране
След като TechLine connect се отвори, уверете се, че е избран вашият Premier VIN, след което щракнете върху „Избор“.
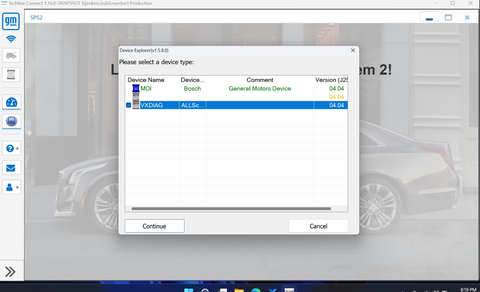
Ще се появи диалогов прозорец за избор на интерфейса с превозното средство, изберете „VXDIAG“.
Уверете се, че е избран Premier VIN в горното падащо меню. Кликнете върху „Напред“.
Показва се списък с всички контролни модули от Premier VIN. От този момент нататък този екран ще бъде мястото, където избирате модула, който искате да програмирате.
Системата ще ви даде грешка при избора на всеки модул, като ви уведоми, че избраният VIN не съвпада с вашия VIN, винаги избирайте „PREVRATE“ (ОТМЕНЯНЕ).
Следните снимки показват процеса на програмиране, както и списъка с ECU. Процесът ще бъде един и същ за всеки модул, въпреки че показаната информация ще варира.
Страници за програмиране на ECU
Списък с ECU Страница 1-3
Програмиране на ECU Страница 1-4
Програмиране на модула за управление на каросерията (K9)
Необходимо е програмиране на модула за управление на каросерията, за да се позволи странично/надлъжно управление на Openpilot. Този модул може да не е необходимо да се програмира, ако вече имате странично управление с Openpilot и в момента използвате педал за надлъжно управление.
- Изберете „Модул за управление на каросерията“ под списъка с ECU в TechLine Connect.
- „Замяна“ на несъответствието на VIN.
- Кликнете върху „Напред“
- Кликнете върху „Напред“
- Щракнете върху „Ok“ за предупреждението за препрограмиране със същата калибрация
- Програмирането ще завърши правилно. Накрая вероятно ще получите предупреждение на таблото да калибрирате отново прозореца на водача. ГОТОВО!
Програмиране на модула за управление на двигателя (K20)
Необходимо е програмиране на модула за управление на двигателя, за да се позволи надлъжната работа на Openpilot
- Изберете „Модул за управление на двигателя“ под списъка с ECU в TechLine Connect
- „Замяна“ на несъответствието на VIN
- Кликнете върху „Напред“
- Кликнете върху „Напред“
- Щракнете върху „Ok“ за предупреждението за препрограмиране със същата калибрация
- Програмирането НЯМА да завърши правилно. Изчакайте, докато приключи опитите и ви покаже диалогов прозорец, който казва, че е възникнала грешка. ГОТОВО!
Програмиране на модула за управление на сервоуправлението (K43)
Необходимо е програмиране на модула за управление на сервоуправлението, за да се активира страничната работа на Openpilot. Не е необходимо за модели Volt, които вече имат LKAS.
- Изберете „Модул за управление на сервоуправлението“ под списъка с ECU в TechLine Connect
- „Замяна“ на несъответствието на VIN
- Кликнете върху „Напред“
- Кликнете върху „Напред“
- Щракнете върху „Ok“ за предупреждението за препрограмиране със същата калибрация
- Програмирането ще завърши правилно
- ГОТОВО!
Програмиране на електронния модул за управление на спирачките (K17)
Необходимо е програмиране на електронния модул за управление на спирачките, за да се осигури надлъжна работа на Openpilot
- Изберете „Електронен модул за управление на спирачките“ под списъка с ECU в TechLine Connect
- „Замяна“ на несъответствието на VIN
- Кликнете върху „Напред“
- Кликнете върху „Напред“
- Щракнете върху „Ok“ за предупреждението за препрограмиране със същата калибрация
- Програмирането ще завърши правилно
- ГОТОВО!
Програмиране на модула за управление на усилвателя на спирачките (K177)
Необходимо е програмиране на модула за управление на усилвателя на спирачките, за да се позволи надлъжната работа на Openpilot
- Изберете „Brake Booster Control Module“ (Модул за управление на усилвателя на спирачките) под списъка с ECU (ECU) в TechLine Connect
- „Замяна“ на несъответствието на VIN
- Кликнете върху „Напред“
- Кликнете върху „Напред“
- Щракнете върху „Ok“ за предупреждението за препрограмиране със същата калибрация
- Програмирането ще завърши правилно
- ГОТОВО!
Програмиране на арматурното табло (P16)
Програмирането на арматурното табло не е необходимо за работа с Openpilot, въпреки че предлага по-опростено потребителско изживяване.
Без програмиране: Иконите на круиз контрола ще изглеждат изкривени
- Иконите на ACC на таблото ще липсват
- Менюто „Разстояние на следване“ на таблото ще липсва
- Менюто „Разстояние на следване“ на таблото ще липсва
С програмиране:
- Иконите на круиз контрола ще показват премиерни версии на иконите
- Иконата ACC ще показва избраното разстояние за следване
- Иконата ACC ще показва, че е насочен потенциален клиент на превозно средство от Openpilot
- Менюто „Разстояние на следване“ ще бъде видимо на таблото.
Допълнителна стъпка в програмирането на инструменталния клъстер на Chevrolet Volt LT 2017
При програмиране на модела Volt LT 2017, за да се избегнат съобщения за грешки и да се осигури правилно показване на арматурното табло, е необходимо да се модифицира фърмуерът на арматурното табло.Това се прави чрез използване на XML/RPO файл, който информира системата на арматурното табло, че определени разширени функции (като например Park Assist и Blind Spot Monitoring) не са налични в автомобила, като по този начин се предотвратява появата на тези съобщения за грешки.
Проблеми с програмирането на арматурното табло:
- Ако флашнете с фърмуера Premier, това ще отстрани някои проблеми, но също така ще задейства някои съобщения за грешки, тъй като моделът Premier включва системи като Park Assist и Blind Spot Monitoring.
- Във версията LT на Volt тези системи не съществуват, така че всеки път, когато автомобилът се стартира, арматурното табло ще показва съобщения за грешки „Service Park Assist“ и „Service Blind Spot Monitor“.
- Освен това, поради несъответствието на VIN (идентификационен номер на превозното средство), това може да доведе до неправилно показване на километража или след известно време пробегът може да се нулира.
Решение:
За да избегнете тези съобщения за грешки, като същевременно запазите оригиналния VIN номер, трябва да информирате системата на арматурното табло, че превозното средство не разполага с тези системи. По този начин съобщенията за грешки няма да се появяват и оригиналният пробег ще бъде запазен. Решението е да се използва XML/RPO файл, който служи като „рецепта“, за да се каже на арматурното табло кои системи са налични и кои не.
Как да използвате:
Процесът е да приложите XML файла към фърмуера на арматурното табло, като замените "YOUR_VIN" във файла със собствения си VIN (идентификационен номер на превозното средство). XML файл за модела Volt от 2017 г. е предоставен, заедно с мостра XMLFile.txt. Всичко, което трябва да направите, е да замените „YOUR_VIN“ със собствения си VIN.
Обяснение
Накратко, фърмуерът е обикновена торта (може да е шоколадова, може да е ванилова). XMLFile.xml е рецептата за приготвяне на всяка обикновена торта, но без вкуса. XMLFile.txt файлът, който създаваме, съдържа рецептата XMLFile.xml да се направи шоколадова торта срещу ванилова торта.
Намерението на GM е да направи този процес безпроблемен и за повечето потребители това е добре. Но когато искаме да модифицираме фърмуера, трябва да го направим ръчно. Времето е важно за това; XMLFile.xml е временно, докато се изтегля фърмуерът и се изтрива незабавно.
ЗАБЕЛЕЖКА: Следвайки следните указания, временно ще получавате грешка „Service Front Camera“ (Сервизна предна камера) всеки път, когато Openpilot е изключен или не е напълно стартиран. Преминете към следващия раздел, за да видите как да отстраните този проблем, ако го намирате за досаден.
Отстраняване на грешка в сервиза на предната камера
Копие „XMLFile.xml„в /DPS/Config.
Отворете „Система за развойно програмиране“. Изберете „Програма“ в горната част на прозореца, след което „Инструмент за развойно програмиране“.
Изберете „1 (33.3KBd)“ от падащото меню „Диагностичен пин“. Изберете „Конфигурация на ECU“.
Изберете „Select XML Config File“ (Избор на XML конфигурационен файл), изберете файла, който току-що копирахте в /DPS/Config. Изберете „Create Build Data File .TXT“ (Създаване на файл с данни за изграждане .TXT)
Уверете се, че VIN номерът в горната част е попълнен с ВАШИЯ VIN номер. Изберете опции под „Избор на RPO“.
За LT Volt:
- EF7 - Съединени щати (или променете съответно на вашата държава)
- KSG - Това коригира иконите на круиз контрола
- UE1 - Онстар
- UE4 - Това активира следния индикатор/меню за разстояние
- UHX - Това коригира иконите на ACC
Изберете „Записване на данни за изграждане на RPO“
Уверете се, че полето „Създаване на файл с данни“ е попълнено с файла, който току-що създадохте.

Изберете „Изпълнение“, не прекъсвайте процеса, докато не завърши или не се появят грешки.
За да проверите бързо правилното изпълнение, опитайте да включите круиз контрола на волана, ще видите новите икони!
Относно горните стъпки, направете по-точно обобщение и бележки:
-
Подгответе папката
В Windows File Explorer отидете до /ПОТРЕБИТЕЛСКО ИМЕ/sps/тип4 папка. Ако тази папка не съществува, създайте я и я отворете. Дръжте я видима заедно със софтуера TechLine Connect.
-
Процес на програмиране
Следвайте същите стъпки, както за другите модули, за да програмирате арматурното табло и преминете към стъпката „Стартиране на програмирането“.
-
Процес на действие
След като щракнете върху „Стартиране на програмирането“, програмата ще установи връзка с превозното средство и ще се появи въртящ се кръг. Веднага щом започне изтеглянето на фърмуера, незабавно извадете VCX Nano от OBDII порта (за да предотвратите действителното програмиране). В този момент, в папката type4 трябва да се появи нова папкаМожете или да го отворите, и да плъзнете XML файла (XMLFile.xml) на работния плот или плъзнете цялата папка на работния плот. В този момент TechLine Connect ще покаже грешка (защото важните файлове са изчезнали), което е нормално. Излезте от TechLine Connect и използвайте XMLFile.xml файл в DPS, както е описано по-рано.
-
Преглед на съдържанието на файла
Можете да отворите XML файла с Notepad, за да видите какво прави всеки RPO код във файла.
-
Важни бележки
Не всички ECU имат XMLFile.xml файл. Изглежда няма конкретна причина някои ECU да го имат, а други не. Ключовият момент е, че арматурното табло трябва да има този файл, което ни позволява да активираме или деактивираме специфични функции. По този начин, версията Volt LT може да активира иконите Premier ACC (адаптивен круиз контрол) без допълнителни системни грешки, като същевременно запазва оригиналния VIN, предотвратявайки грешка за несъответствие на VIN (изчерпан пробег).
Отстраняване на грешка „Сервиз на предната камера“
-
Описание на грешката
Съобщението за грешка „Service Front Camera“ може временно да се появи по време на стартиране, преди Openpilot да се зареди напълно. Това може да е досадно, но за щастие е поправимо.
-
Метод за фиксиране
Модифициран XMLFile.xml предоставен е файл. Грешката е причинена от два специфични RPO кода, приложени към IPC (Клъстер на арматурното табло):
- КСГАдаптивен круиз контрол със Stop/Go
- UHXАктивна безопасност в лентата - Асистент за поддържане на лентата
Тези системи обикновено са оборудвани с камери в моделите Premium.
-
Редактиране на файлове
The XMLFile.xml Файлът съдържа няколко важни раздела. DPS използва този файл, за да конструира набора от инструкции за IPC. Всички операции са базирани на RPO кодове.
-
Раздел на кода на RPO
В долната част на файла са изброени RPO кодовете, например:
OCKSG KSG КРУИЗ КОНТРОЛ - АВТОМАТИЧЕН, АДАПТИВЕН, СЪС STOP/GO
Над това има опции за RPO, а още по-горе има настройки за DTC (диагностични кодове за неизправности).
-
Кодове за дефектни кодове (DTC)
Например:
P_ENABLE_DTC_C23A_FTB_00 3 4 1
Тези кодове се задействат, когато са избрани определени RPO опции.
-
Деактивиране на грешката „Сервиз на предната камера“
- Първият RPO код, причиняващ грешката „Сервиз на предната камера“, е КСГ (Адаптивен круиз контрол). В
XMLFile.xml, намерете този код и променете съответната DTC стойност от 01 на 00, за да деактивирате грешката. По-конкретно, тази промяна се прави на ред 969. - Вторият RPO код, причиняващ грешката, е UHX (Активна безопасност в лентата на движение - Асистент за поддържане на лентата). Във файла ще намерите два записа, свързани с UHX:
Индикаторът_за_помощ_за_пазене_на_лентата_Е_АКТИВИРАН и P_OPTION_LANE_KEEPER_PRESENTПроменете стойността от 01 на 00 на ред 1595, за да кажете на IPC да не търси системата по CAN шината, докато индикаторът остава активиран.
-
Кандидатствайте и програмирайте
След като направите редакциите, заредете XML файла в DPS и следвайте инструкциите за флашване на IPC. След това вече няма да виждате грешката „Service Front Camera“ (Сервиз на предната камера).
Заключителни бележки
- Предупреждение за рискКакто бе споменато по-рано, тези стъпки са на ваш собствен риск. Те проработиха на моя модел, но резултатите може да варират за различните модели или години.
- Изчистване на кодове за неизправностиСлед програмирането може да се наложи да използвате GDS2 или четец на кодове, за да изчистите всички DTC (диагностични кодове за неизправности) или да рестартирате лампата за проверка на двигателя. Това е нормално.
- Прекалибриране на прозорецаМоже да се наложи да калибрирате отново прозореца на водача, като го повдигнете и спуснете напълно, за да калибрирате автоматичната работа.
- Рекалибриране на електронната ръчна спирачкаОсвен това може да се наложи да калибрирате отново електронната ръчна спирачка, като използвате GDS2, който ви води през настройването на спирачката, докато системата отчита нейното положение. Проверете списъка с DTC в GDS2, за да видите дали тази стъпка е необходима.
Отстраняване на неизправности
Ако получите „Cruise Fault“ и не можете да активирате Openpilot control, след като потвърдите, че целият фърмуер е флашнат правилно, опитайте да калибрирате отново сензора за положение на педала на спирачката чрез SPS.