Opastus: Kuinka ohjelmoida vuoden 2017 Chevrolet Volt LT Openpilot-toimintaa varten Techline Connect SPS:n avulla.
Useat ihmiset ovat onnistuneesti ottaneet Openpilotin käyttöön vuoden 2017 LT Volts -laitteissa ilman vakio-Premier-ominaisuuksia. Tässä osiossa käsitellään Openpilotin käyttöönottoon tarvittavia laiteohjelmistomuutoksia. Myös laitteistomuutoksia tarvitaan. Vakionopeudensäädin ei toimi näiden muutosten jälkeen, ja Openpilotissa on käytettävissä vain vakionopeudensäädin, kun se on käynnistetty.
Johdanto
Chevrolet Volt (2016-2018) on suosittu ajoneuvo käytettäväksi OpenPilotin ja C2/C3:n kanssa. Alkuperäisestä pakkauksesta lähtien vain Premier-lisävarusteena saatava Volt ja Driver Convenience II -paketti ovat tuettuja. Tässä mallissa on tutka etusäleikön rusetin takana, LKAS ja mukautuva vakionopeudensäädin. LT-versiota ei virallisesti tueta, eikä Premier-versiota ilman tutkaa olevaa mukautuvaa vakionopeudensäädintä. Mutta... On olemassa ratkaisu! Joka tapauksessa sinulla on oltava tutka, jonka voi helposti ostaa ja kytkeä OBDII-porttiin, sekä läpinäkyvä tutkarusetti, jota on paljon vaikeampi löytää. Uskon, että tämä on valinnainen, jos haluat käyttää Alpha E2E:n pitkittäismallia.
Kaikki ajoneuvon päämoduulit ovat samat LT- ja Premier-versioissa. Tämä tarkoittaa, että ainoa rajoitus on ohjelmistossa, i.e., joka ohjaa ECM:ää (moottorin ohjausyksikköä), BCM:ää (korin ohjausyksikköä), jarruyksikköä, ohjaustehostimen moduulia ja mittaristoa, ovat valmiita vastaanottamaan/siirtämään tietoja toistensa ja OpenPilotin välillä. GM saattaa muuttaa ohjelmistoaan tulevaisuudessa, mikä keskeyttää prosessin. Kuten aina, tee tämä omalla vastuullasi. Pahimmassa tapauksessa ajoneuvomoduuli voi lakata toimimasta, jos se tehdään väärin. Tällainen laiteohjelmiston muutos johtaa vikakoodeihin (DTC), jotka ovat käyttäjälle näkymättömiä (ei kojelaudan kuvakkeita), mutta jotka näkyvät, jos viet ajoneuvon jälleenmyyjälle. Kaikki koodit viittaavat katkenneeseen viestintään Premier-moduulien kanssa, joita ei ole olemassa, kuten pysäköintiavustin ja kuolleen kulman valvonta, eivätkä ne vaikuta normaaliin toimintaan.
Ohjelmoinnin jälkeen vakionopeudensäädin lakkaa olemasta, sinun on aina käytettävä Openpilotia.
Pakollinen
- GM TechLine Connect (sisältyy ostettuun VIN-koodia vastaan)
- GM:n kehitysohjelmointijärjestelmä (DPS)
- Windows 10- tai 11-tietokone, jossa on vähintään 8 Gt RAM-muistia ja modernit tekniset tiedot (katso tekniset tiedot GM:n verkkosivuilta)
- VX-hallinta
- VXDIAG VCX Nano GM OBDII -ohjelmointilaite (tai vastaava tuote/GM:n virallinen MDI)
- Noin 2–5 tuntia tietokoneen nopeudesta ja käyttötaidoistasi riippuen
- Internet-yhteys kaikkien ohjelmointitehtävien aikana
Huomautuksia:
- Auton on oltava irrotettuna seinälaturista.
- Auto tulisi kytkeä 12 V:n ylläpitolaturiin (tein tämän ilman, mutta ohjelmisto suosittelee sitä, koska akun jännitevaihtelut voivat aiheuttaa haitallisia ohjelmointivaikutuksia). i.e., moduulin muuraus).
- Jos käytät kannettavaa tietokonetta, varmista, että akun varaus on riittävä, tai pidä se kytkettynä pistorasiaan.
- Olen havainnut ohjelmoinnin onnistuvan parhaiten auton ollessa huoltotilassa (pidä käynnistyspainiketta pohjassa jalalla jarrupolkimesta noin 5 sekuntia). * Jos tässä on ongelmia, kokeile auton ollessa täysin päällä tai sammutettuna.
- Kun ohjelmointi on valmis, ole äärimmäisen varovainen testatessasi Openpilotia ensimmäistä kertaa; se ei välttämättä toimi oikein (ei pitkittäis- tai sivuttaisohjausta). Kun olet varmistanut, että kaikki toimii odotetulla tavalla, se on aivan kuin Premier Volt!
- Ohjelmoinnin aikana erilaiset merkkivalot/äänet syttyvät ja sammuvat/releet tärisevät; tämä on normaalia.
- Jos et poista virustorjuntaa ja palomuuria käytöstä, sinulla on ongelmia! VX Manager on jostain syystä korostettu viruksena. Asensin sen varmuuden vuoksi tuoreeseen Windows-asennukseen.
Ohjelmiston valmistelu
- Asenna VX Manager. Asenna vain “PASSTHROUGH - J2534”. GM-asennus käsittelee GM-paketit.
- Asenna GM TechLine Connect
- Asenna GM:n kehitysohjelmointijärjestelmä/-korjaukset
ACDelcoTDS
ACDelcoTDS on GM:n ajoneuvojen diagnostiikkaan ja ohjelmointiin tarkoitettu verkkoportaali. Yksi VIN-koodi maksaa 45 dollaria vuodessa.
Kirjaudu sisään https://www.acdelcotds.com/tilauksettai luo tili tarvittaessa.
Kun ostat VIN-koodin järjestelmän kautta, sinun on löydettävä VIN-koodi, jossa on haluamasi ohjelmisto. i.e..., Premier Driver Confidence II -paketilla (varmista, että siinä on litteä muovilista rusetin kohdalla säleikössä). Varmista myös, että valitsemasi valmistenumero (VIN) on sama kuin ajoneuvosi vuosimalli.
Voit halutessasi ostaa toisen VIN-koodin, joka vastaa omistamaasi ajoneuvoa. Jos asiat eivät toimi, voit flashata alkuperäisen laiteohjelmiston takaisin autoon (tai jos myyt auton ja haluat palauttaa sen alkuperäiseen tilaan).
Kun olet ostanut tuotteen, näet aktiiviset VIN-numerosi kohdassa ”Tilaukseni”. Napsauta ”Näytä” ja valitse sitten Premier-VIN. Tämä vie sinut sivulle, jolla voit ladata ja asentaa TechLine Connectin, jos et ole jo tehnyt niin. Jos TechLine Connect on asennettu, näet vaihtoehdon sen käynnistämiseksi. Ennen TechLine Connectin suorittamista/asentamista avaa VX Manager. VCX Nano antaa merkkiäänen yhteyden vahvistamiseksi. Jos näin ei tapahdu, valitse päänäytöltä Yhdistä uudelleen.
VIN-tilaukset.
Yhdistä VXManager uudelleen tarvittaessa.
Varsinainen ohjelmointi
Kun TechLine Connect on avattu, varmista, että Premier VIN -koodisi on valittuna ja napsauta sitten ”Valitse”.
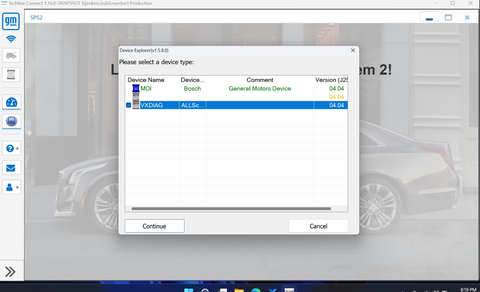
Näyttöön tulee valintaikkuna, jossa voit valita ajoneuvon käyttöliittymän. Valitse ”VXDIAG”.
Varmista, että Premier VIN on valittuna ylävalikossa. Napsauta "Seuraava".
Näyttöön tulee luettelo kaikista Premier VIN -ohjausmoduuleista. Tästä eteenpäin tällä näytöllä voit valita ohjelmoitavan moduulin.
Järjestelmä antaa virheilmoituksen jokaisen moduulin valinnan yhteydessä, jolloin valittu VIN-numero ei vastaa omistusnumeroasi. Valitse aina "OHITUS".
Seuraavat kuvat näyttävät ohjelmointiprosessin sekä ECU-luettelon. Prosessi on sama jokaiselle moduulille, vaikka näytettävät tiedot vaihtelevatkin.
ECU-ohjelmointisivut
Ohjainyksikköluettelo Sivut 1–3
Ohjelmointiyksikön sivu 1-4
Koriohjausmoduulin ohjelmointi (K9)
Openpilotin sivuttais-/pitkittäissuuntainen toiminta edellyttää koriohjausmoduulin ohjelmointia. Tätä moduulia ei välttämättä tarvitse ohjelmoida, jos sinulla on jo Openpilotin sivuttaisohjaus ja käytät tällä hetkellä poljinta pitkittäissuuntaiseen ohjaukseen.
- Valitse TechLine Connectin ECU-luettelosta ”Body Control Module”.
- VIN-numeron virheellisyys "Ohita".
- Napsauta "Seuraava"
- Napsauta "Seuraava"
- Napsauta "Ok", niin näet varoituksen uudelleenohjelmoinnista samalla kalibroinnilla.
- Ohjelmointi valmistuu oikein. Lopuksi saat todennäköisesti kojelautaan varoituksen kuljettajan ikkunan uudelleenkalibroinnista. VALMIS!
Moottorin ohjausmoduulin ohjelmointi (K20)
Moottorinohjausmoduulin ohjelmointi vaaditaan Openpilotin pitkittäistoiminnan mahdollistamiseksi
- Valitse TechLine Connectin ECU-luettelosta ”Moottorin ohjausyksikkö”
- VIN-numeron virheellisyys
- Napsauta "Seuraava"
- Napsauta "Seuraava"
- Napsauta "Ok", niin näet varoituksen uudelleenohjelmoinnista samalla kalibroinnilla.
- Ohjelmointi EI pääty oikein. Odota, kunnes se lopettaa yrittämisen ja näyttää valintaikkunan, jossa ilmoitetaan virheestä. VALMIS!
Ohjaustehostimen ohjausmoduulin ohjelmointi (K43)
Ohjaustehostimen ohjausmoduulin ohjelmointi vaaditaan Openpilotin sivuttaiskäytön mahdollistamiseksi. Ei vaadita Volt-malleille, joissa on jo LKAS.
- Valitse TechLine Connectin ECU-luettelosta ”Tehostinohjausmoduuli”.
- VIN-numeron virheellisyys
- Napsauta "Seuraava"
- Napsauta "Seuraava"
- Napsauta "Ok", niin näet varoituksen uudelleenohjelmoinnista samalla kalibroinnilla.
- Ohjelmointi päättyy oikein
- TEHTY!
Elektronisen jarruohjausmoduulin ohjelmointi (K17)
Openpilotin pitkittäisliikkeen mahdollistamiseksi vaaditaan elektronisen jarruohjausmoduulin ohjelmointi
- Valitse TechLine Connectin ECU-luettelosta ”Electronic Brake Control Module”
- VIN-numeron virheellisyys
- Napsauta "Seuraava"
- Napsauta "Seuraava"
- Napsauta "Ok", niin näet varoituksen uudelleenohjelmoinnista samalla kalibroinnilla.
- Ohjelmointi päättyy oikein
- TEHTY!
Jarrutehostimen ohjausmoduulin ohjelmointi (K177)
Jarrutehostimen ohjausmoduulin ohjelmointi vaaditaan Openpilotin pitkittäistoiminnan mahdollistamiseksi.
- Valitse TechLine Connectin ECU-luettelosta ”Jarrutehostimen ohjausmoduuli”.
- VIN-numeron virheellisyys
- Napsauta "Seuraava"
- Napsauta "Seuraava"
- Napsauta "Ok", niin näet varoituksen uudelleenohjelmoinnista samalla kalibroinnilla.
- Ohjelmointi päättyy oikein
- TEHTY!
Mittaristo-ohjelmointi (S16)
Mittaristo-ohjelmointia ei vaadita Openpilotin käyttöön, vaikka se tarjoaakin virtaviivaisemman käyttökokemuksen.
Ilman ohjelmointia: Vakionopeudensäätimen kuvakkeet näyttävät vääristyneiltä
- Mittariston ACC-kuvakkeet puuttuvat
- Mittariston ”Seuraava etäisyys” -valikko puuttuu
- Mittariston ”Seuraava etäisyys” -valikko puuttuu
Ohjelmoinnin kanssa:
- Vakionopeudensäätimen kuvakkeet näyttävät kuvakkeiden ensiluokkaiset versiot
- ACC-kuvake näyttää valitun seurantaetäisyyden
- ACC-kuvake näyttää, että Openpilot-ajoneuvoon on kohdistettu johtolanka
- Mittariston ”Seuraava etäisyys” -valikko tulee näkyviin
Lisävaihe vuoden 2017 Chevrolet Volt LT -mittariston ohjelmoinnissa
Vuoden 2017 Volt LT -mallin ohjelmoinnissa on tarpeen muokata mittariston laiteohjelmistoa virheilmoitusten välttämiseksi ja mittariston oikean näytön varmistamiseksi.Tämä tehdään ilmoittamalla mittaristojärjestelmälle XML/RPO-tiedoston avulla, että ajoneuvossa ei ole tiettyjä edistyneitä ominaisuuksia (kuten pysäköintiavustin ja kuolleen kulman valvonta), mikä estää näiden virheilmoitusten näkymisen.
Mittaristo-ohjelmointiongelmat:
- Premier-laiteohjelmiston flashaaminen korjaa joitakin ongelmia, mutta se laukaisee myös joitakin virheilmoituksia, koska Premier-malli sisältää järjestelmiä, kuten pysäköintiavustimen ja kuolleen kulman valvontajärjestelmän.
- Voltin LT-versiossa näitä järjestelmiä ei ole, joten aina, kun ajoneuvo käynnistetään, mittaristossa näkyy virheilmoituksia "Service Park Assist" ja "Service Blind Spot Monitor".
- Lisäksi VIN-numeron (ajoneuvon tunnistenumeron) yhteensopimattomuuden vuoksi matkamittari voi näyttää virheellisiä lukemia tai jonkin ajan kuluttua matkamittarin lukema voi nollautua.
Ratkaisu:
Näiden virheilmoitusten välttämiseksi ja alkuperäisen VIN-numeron säilyttämiseksi sinun on ilmoitettava mittaristojärjestelmälle, että ajoneuvossa ei ole näitä järjestelmiä. Tällä tavoin virheilmoituksia ei tule näkyviin ja alkuperäinen ajomäärä säilyy. Ratkaisu on käyttää XML/RPO-koontitiedostoa, joka toimii "reseptinä" kertomaan mittaristolle, mitkä järjestelmät ovat läsnä ja mitkä eivät.
Käyttöohjeet:
Prosessissa XML-tiedosto otetaan käyttöön mittariston laiteohjelmistossa korvaamalla tiedostossa oleva "YOUR_VIN" omalla VIN-numerollasi (Vehicle Identification Number). XML-tiedosto vuoden 2017 Volt-mallille toimitetaan sekä näyte XMLFile.txt. Sinun tarvitsee vain korvata "YOUR_VIN" omalla VIN-koodillasi.
Selitys
Lyhyesti sanottuna, laiteohjelmisto on geneerinen kakku (voi olla suklaata, voi olla vaniljaa). XMLFile.xml on resepti minkä tahansa geneerisen kakun tekemiseen ilman makua. XMLFile.txt luomamme tiedosto kertoo reseptin XMLFile.xml suklaakakun tekeminen vs. vaniljakakun tekeminen.
GM:n tarkoituksena on tehdä tästä prosessista saumaton, ja useimmille käyttäjille se sopii. Mutta kun haluamme muokata laiteohjelmistoa, meidän on tehtävä se manuaalisesti. Ajoitus on tässä tärkeää; XMLFile.xml on väliaikainen laiteohjelmiston latauksen ajaksi ja poistetaan välittömästi.
HUOMAUTUS: Seuraavia ohjeita noudattamalla saat tilapäisesti virheilmoituksen "Huolto etukamerassa" aina, kun Openpilot-yhteys katkeaa tai se ei käynnisty kokonaan. Siirry seuraavaan osioon nähdäksesi, miten voit korjata tämän ongelman, jos se on mielestäsi ärsyttävä.
Huolto Etukameran virheen korjaus
Kopioi “XMLFile.xml” /DPS/Config-kansioon.
Avaa ”Kehitysohjelmointijärjestelmä”. Valitse ikkunan yläreunasta ”Ohjelma” ja sitten ”Kehitysohjelmointityökalu”.
Valitse ”Diagnostiikkanasta”-pudotusvalikosta ”1 (33,3 kt)”. Valitse ”ECU-konfiguraatio”.
Valitse ”Select XML Config File” ja valitse juuri /DPS/Config-kansioon kopioimasi tiedosto. Valitse ”Create Build Data File .TXT”.
Varmista, että yläreunassa olevassa VIN-kohdassa on OMAN VIN-koodisi. Valitse vaihtoehdot kohdasta ”RPO-valinnat”.
LT Voltille:
- EF7 - Yhdysvallat (tai vaihda maasi vastaavasti)
- KSG - Tämä korjaa vakionopeudensäätimen kuvakkeet
- UE1 - Onstar
- UE4 - Tämä ottaa käyttöön seuraavan etäisyyden ilmaisimen/valikon
- UHX - Tämä korjaa ACC-kuvakkeet
Valitse ”Kirjoita RPO-koontitiedot”
Varmista, että ”Luo datatiedosto” -ruutuun on lisätty juuri luomasi tiedosto.

Valitse ”Suorita”, älä keskeytä prosessia ennen kuin se on valmis tai antaa virheen.
Tarkistaaksesi nopeasti oikean toteutuksen, yritä kytkeä vakionopeudensäädin päälle ohjauspyörästä, näet uudet kuvakkeet!
Tee yllä olevista vaiheista tarkempi yhteenveto ja muistiinpanot:
-
Valmistele kansio
Siirry Windowsin tiedostonhallinnassa kohtaan /KÄYTTÄJÄTUNNUS/sps/type4 kansio. Jos tätä kansiota ei ole olemassa, luo ja avaa se. Pidä se näkyvissä TechLine Connect -ohjelmiston rinnalla.
-
Ohjelmointiprosessi
Ohjelmoi mittaristo samoilla ohjeilla kuin muissa moduuleissa ja siirry vaiheeseen "Aloita ohjelmointi".
-
Toimintaprosessi
Kun olet napsauttanut "Aloita ohjelmointi", ohjelma muodostaa yhteyden ajoneuvoon ja näkyviin tulee pyörivä ympyrä. Heti kun laiteohjelmiston lataus alkaairrota VCX Nano välittömästi OBDII-portista (estääksesi varsinaisen ohjelmoinnin). Tässä vaiheessa, type4-kansioon pitäisi ilmestyä uusi kansioVoit joko avata sen ja vetää XML-tiedoston (XMLFile.xml) työpöydälle tai vedä koko kansio työpöydälle. Tässä vaiheessa TechLine Connect näyttää virheen (koska tärkeät tiedostot ovat poissa), mikä on normaalia. Poistu TechLine Connectista ja käytä XMLFile.xml tiedosto DPS:ssä aiemmin kuvatulla tavalla.
-
Näytä tiedoston sisältö
Voit avata XML-tiedoston Muistiolla nähdäksesi, mitä kukin RPO-koodi tiedostossa tekee.
-
Tärkeitä huomioita
Kaikissa ECU-yksiköissä ei ole XMLFile.xml tiedosto. Ei näytä olevan mitään erityistä syytä, miksi joissakin ohjausyksiköissä olisi se, kun taas toisissa ei. Keskeistä on, että mittaristossa on oltava tämä tiedosto, jonka avulla voimme ottaa käyttöön tai poistaa käytöstä tiettyjä ominaisuuksia. Tällä tavoin LT-versio Volt voi ottaa käyttöön Premier ACC (Adaptive Cruise Control) -kuvakkeet ilman lisäjärjestelmävirheitä säilyttäen samalla alkuperäisen VIN-numeron, estäen VIN-numeron epäsuhtavirheen (katkoviivalla merkitty kilometrimäärä).
"Huolto etukamera" -virheen korjaus
-
Virheen kuvaus
"Huolto etukamerassa" -virheilmoitus saattaa ilmestyä tilapäisesti käynnistyksen aikana ennen kuin Openpilot on käynnistynyt kokonaan. Tämä voi olla ärsyttävää, mutta onneksi se on korjattavissa.
-
Korjausmenetelmä
Muokattu XMLFile.xml tiedosto on toimitettu. Virheen aiheuttavat kaksi IPC:hen (Instrument Panel Cluster) sovellettua RPO-koodia:
- KSGMukautuva vakionopeudensäädin Stop/Go-toiminnolla
- UHX: Kaistanpitoavustin – kaistanpitoavustin
Nämä järjestelmät on tyypillisesti varustettu kameroilla Premium-malleissa.
-
Tiedoston muokkaaminen
The XMLFile.xml tiedosto sisältää useita tärkeitä osioita. DPS käyttää tätä tiedostoa IPC:n käskykannan rakentamiseen. Kaikki toiminnot perustuvat RPO-koodeihin.
-
RPO-koodiosio
Tiedoston alareunassa on lueteltu RPO-koodit, esimerkiksi:
OCKSG KSG VAKIONOPEUDENSÄÄDIN - AUTOMAATTINEN, MUKAUTTUVA, STOP/GO-TOIMINNOLLA
Tämän yläpuolella on RPO-asetukset ja vielä ylempänä DTC-asetukset (diagnostiikkakoodit).
-
Vikakoodit
Esimerkiksi:
P_ENABLE_DTC_C23A_FTB_00 3 4 1
Nämä koodit laukeavat, kun tietyt RPO-asetukset valitaan.
-
"Huolto etukamera" -virheen poistaminen käytöstä
- Ensimmäinen RPO-koodi, joka aiheuttaa "Huolto etukamera" -virheen, on KSG (Mukautuva vakionopeudensäädin).
XMLFile.xml, etsi tämä koodi ja muuta siihen liittyvän vikakoodin arvo 01:stä 00:aan poistaaksesi virheen käytöstä. Tämä muutos tehdään erityisesti rivillä 969. - Toinen virheen aiheuttava RPO-koodi on UHX (Kaistanpitoavustin - kaistanpitoavustin). Tiedostosta löydät kaksi UHX:ään liittyvää merkintää:
P_LANE_KEEPER_ASSIST_INDICATOR_ENABLED ja P_OPTION_LANE_KEEPER_PRESENTMuuta rivillä 1595 arvoksi 01 arvoksi 00, jotta IPC ei etsi järjestelmää CAN-väylästä, mutta pitää merkkivalon käytössä.
-
Hae ja ohjelmoi
Kun olet tehnyt muokkaukset, lataa XML-tiedosto DPS:ään ja seuraa ohjeita IPC:n flash-asennuksen suorittamiseksi. Tämän jälkeen et enää näe "Huolto etukamera" -virhettä.
Loppuhuomautukset
- RiskivaroitusKuten aiemmin mainittiin, nämä vaiheet ovat omalla vastuullasi. Ne toimivat minun mallissani, mutta tulokset voivat vaihdella eri mallien tai vuosimallien välillä.
- Vikakoodien tyhjentäminenOhjelmoinnin jälkeen saatat joutua käyttämään GDS2:ta tai vikakoodien lukulaitetta mahdollisten vikakoodien (DTC) poistamiseen tai moottorin vikavalon nollaamiseen. Tämä on normaalia.
- Ikkunan uudelleenkalibrointiKuljettajan ikkuna on ehkä kalibroitava uudelleen nostamalla ja laskemalla se kokonaan automaattisen toiminnan kalibroimiseksi.
- Elektronisen seisontajarrun uudelleenkalibrointiLisäksi saatat joutua kalibroimaan sähköisen seisontajarrun uudelleen GDS2:n avulla, joka opastaa sinua jarrun asettamisessa samalla, kun järjestelmä lukee sen sijainnin. Tarkista GDS2:n vikakoodiluettelosta, onko tämä vaihe tarpeen.
Vianmääritys
Jos saat "Vakionopeudensäätövirheen" etkä voi ottaa Openpilot-ohjausta käyttöön sen jälkeen, kun olet varmistanut, että kaikki laiteohjelmistot on päivitetty oikein, yritä kalibroida jarrupolkimen asentoanturi uudelleen SPS:n kautta.